Local Interconnect Network の略
CANのサブバスという位置づけ→CANと比較して低コストのネットワーク構築が可能
特長
- マスタスレーブ方式
- スレーブノードはマスタノードが送信するメッセージフレームに組み込まれた時間補正用基準波形を計測しボーレートを都度修正する
- CANと比較してコスト削減
- ワイヤが2本から1本へ
- MCU用発振子がRC発振orマイコン内蔵発振回路でOK
- トランシーバはコンパレータ方式
パワートレインやシャシー制御ほど大量の情報や高速な通信を必要としない制御向け
- ワイパー制御
- サンルーフ
- 乗員検知
- ドアミラーの開閉
- ヘッドライトの点灯 等
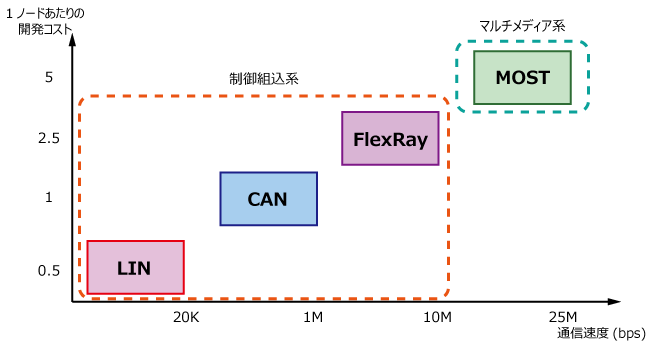
他プロトコルとの位置づけ
CANやFlexRayに比べ通信速度が遅い
概要仕様(CANとの比較)
| LIN | CAN | |
| ネットワーク構成 | シングルマスタ(調停禁止)、多スレーブ(最大16ノード) | マルチマスタ |
| 伝送路 | 1線式 最長40m | 2線式(一部1線式) |
| トランシーバ | コンパレータ方式 | 差動式 |
| 通信方式 | 半2重方式(NRZ方式)UART(data長8bit、1stop bit) + ソフト又は専用ハード | 半2重方式(NRZ方式)専用ハード |
| ボーレート | ~20kbps | ~1Mbps |
| 同期方式 | データフィールド毎にスタートビット立下りエッジに対し、受信ノードが同期スレーブがマスタから送信されるフレームに必ず存在する補正用フィールドによって常に通信速度を補正 | レセシブ→ドミナントの立下りエッジに対し、全てのノードが同期を合わせる |
| その他特長 | Wake up/Sleep機能サポート |
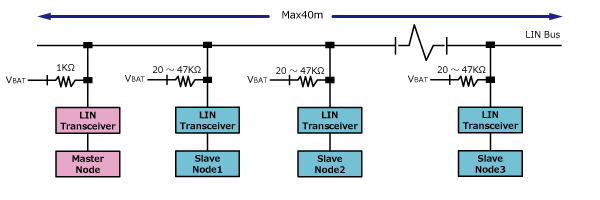
バス仕様
バッテリー電源をそのまま使用
オープンコレクタのトランシーバとプルアップ抵抗を使用したシングルワイヤで構成
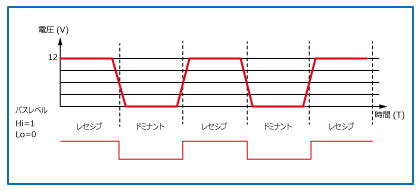
バスのレベルは”ドミナント”と”レセシブ”
| 論理レベル | 論理値 | 電圧レベル |
| ドミナント | 0 | GND |
| レセシブ | 1 | バッテリー(8~18V) |
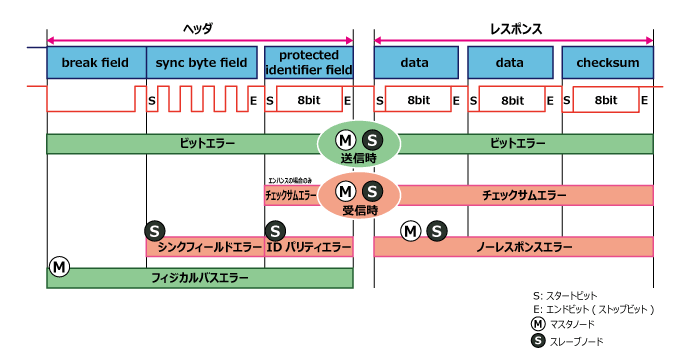
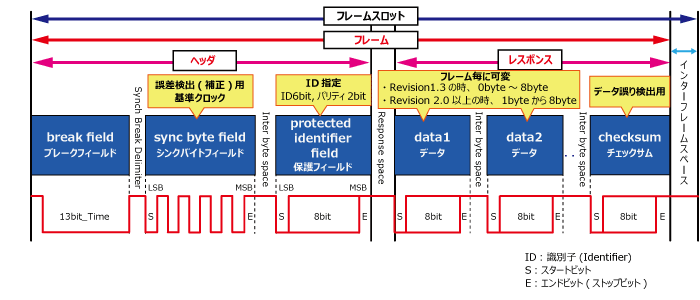
フレーム構成
ヘッダとレスポンスで構成
LSBファースト
ヘッダはマスタが出力。次の3つのフィールドで構成
- break field : フレームの始まりを示す
- sync byte field : 各ノードの周波数誤差を調整する
- protected identifier field : ID, DLCとParityから構成される。スレーブのノード指定を意味する
レスポンスはマスタ 又は マスタが指定したスレーブが出力
次の2つのフィールドで構成される
- data1 – data8 : データの中身 Revision2.0以降では0~8バイトの任意の長さ
- checksum : モジュロー256演算結果を反転したもの
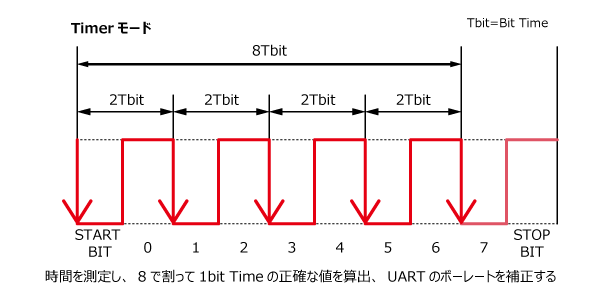
基準クロックの調整
マスタはsync byte fieldで0x55を送信
スレーブはスタートビットからの4回分のエッジ間時間を計測し、8で割ることで1ビットタイムを算出。
この時間からボーレートの調整を行う。
また、break fieldが規定範囲にあるか否かを確認。
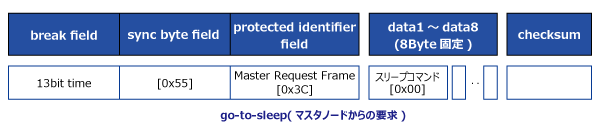
Sleep&Wake up機能
遷移条件:
マスタは自ノードによる判断で遷移
スレーブはマスタからの要求(go-to-sleep)があった場合と、Revision2.0以降では一定期間
(Rev2.0では4s以上、Rev2.1以降では4~10s)以上通信が無かった場合に遷移
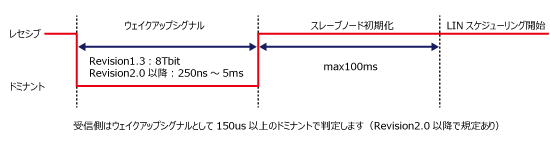
復帰:
エラーの種類
6種類